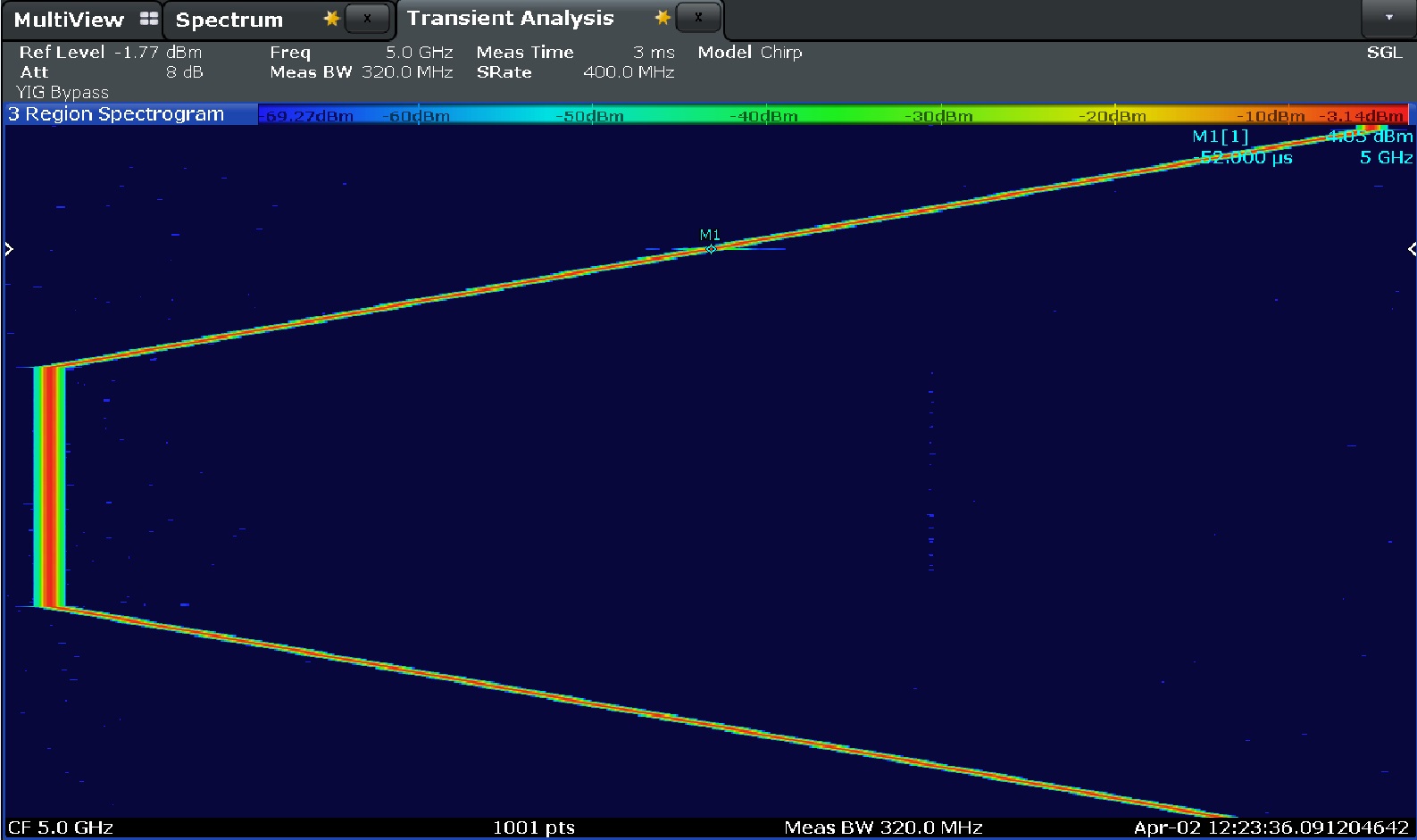
FM linearity displayed as spectrogram on a spectrum analyser
The attraction of radar is that it provides fast and clear-cut measurement of the velocity and distance of multiple objects under any weather conditions.
The relevant radar signals are frequency-modulated and can be analysed with spectrum analyzers. In this manner, developers of radar components can automatically detect, measure and display the signals in the time and frequency domains, even up to frequencies of 500GHz.
For automotive applications, vehicle manufacturers can currently make use of four frequency bands at 24GHz and 77GHz with different bandwidths. While the 24 GHz ISM band has a maximum bandwidth of 250MHz, the 24GHz ultrawideband (UWB) already offers up to 5GHz; however, this is allowed only until the end of 2022 due to international regulations.
The band that will be available past this date with up to 4GHz bandwidth lies between the frequencies of 77GHz and 81GHz. It is already used for forward-looking applications.
Since the signal bandwidth determines the range resolution, it is very important in radar applications.
Accordingly, the other allocated frequencies of 122GHz and 244GHz for this application with a bandwidth of only 1 GHz will see little use in the automotive industry and are restricted to research projects until further notice.
Speed plus distance
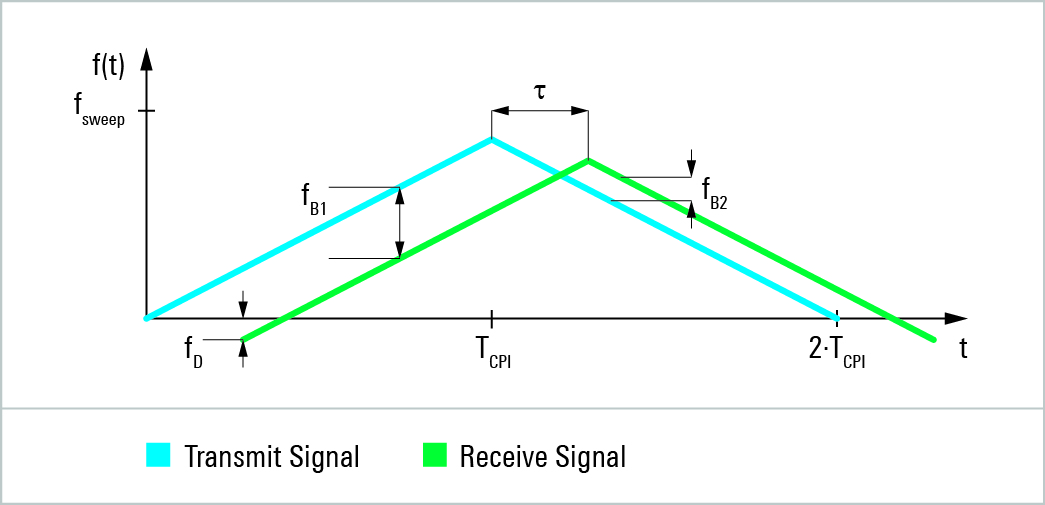
Components of LFMCW radar signal
When using radar signals in such applications, developers generally want to simultaneously determine the speed and distance of multiple objects within a single measurement cycle. However, ordinary pulse radar cannot easily handle such a task.
Based on the timing offset between transmit and receive signals within a cycle, only the distance can be determined. If the speed must also be determined, a frequency-modulated signal is used, e.g. a linear frequency-modulated continuous-wave (LFMCW) signal.
The frequency offset between transmit and receive signals is also known as the beat frequency. The beat frequency has a Doppler frequency component fD and a delay component fT.
The Doppler component contains information about the velocity, and the delay component contains information about the range.
With two unknowns of range and velocity, two beat-frequency measurements are needed to determine the desired parameters. Immediately after the first signal, a second signal with a linearly modified frequency is incorporated into the measurement.
If there are multiple targets, however, it is no longer possible to unambiguously determine the beat-frequency pairs for several fast frequency changes, called chirps. Ghost targets are generated that do not really exist. This problem can be solved using various transmit signals with different chirp rates, but the measurement time increases accordingly.
Determination of both parameters within a single measurement cycle is possible with FM chirp sequences.
Since a single chirp is very short compared with the total measurement cycle, each beat frequency is determined primarily by the delay component fT. In this manner, the range can be ascertained directly after each chirp.
The Doppler frequency is neglected initially. However, if you determine the phase shift between several successive chirps within a sequence, the Doppler frequency can be determined using a Fourier transformation, making it possible to calculate the speed of the vehicles in front.
The speed resolution improves as the length of the measurement cycle is increased. This requires radar components with significant processing power.
Characterisation of the radar signal
In the development of radar sensors with LFMCW signals, any deviations from the ideal shape of the transmit signals cause errors in the determination of the velocity and range. Especially in safety-relevant applications, this can have disastrous consequences. Important parameters such as the frequency linearity of a chirp, its length and its reproducibility within a chirp sequence must all be verified.
Signals of this type with rapidly changing frequencies and wide bandwidths can be characterised using a time-domain signal analysis technique known as transient analysis. A spectrum analyser that also has the capability to analyse transients allows automatic detection and analysis of linear FM chirp sequences.
Important chirp parameters such as the chirp rate, chirp length and chirp rate deviation are displayed, eliminating the need for manual analysis with marker functions. I/Q-based data analysis lies at the heart of this method.
By recording and saving all of the I/Q data, it is possible to determine an analysis range in terms of the frequency, measurement bandwidth and recording time. The size of this range determines how many chirps are subsequently measured, and the chirp rate deviations relative to an ideal chirp are observed.
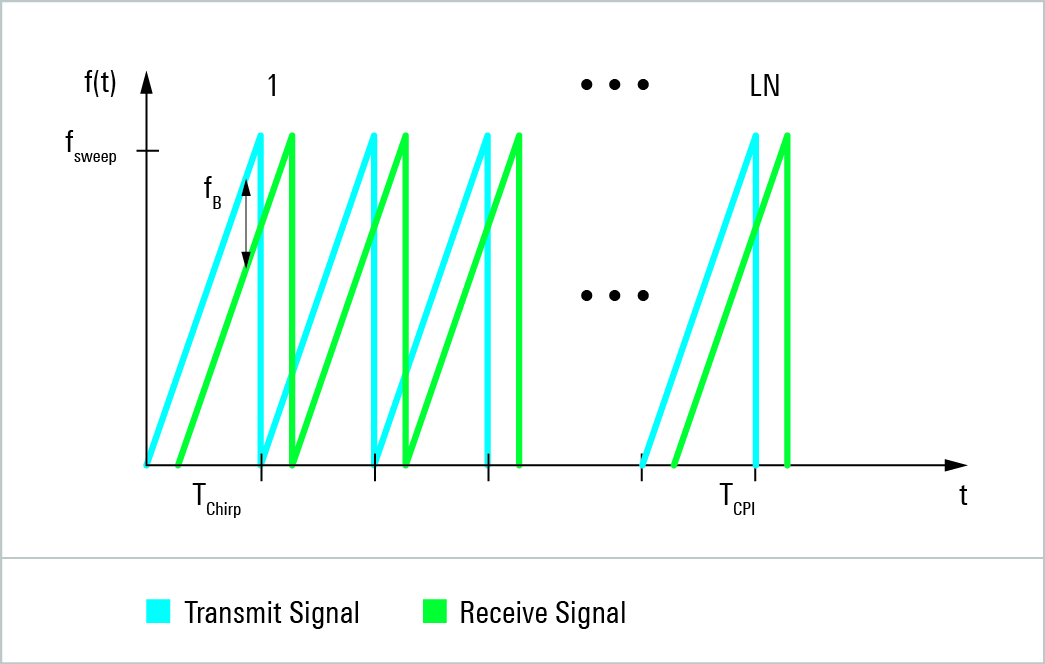
FM chirp signals used to determine speed and distance
The maximum measurement time decreases if a larger measurement bandwidth is selected. In addition, a timing window can be defined in order to neglect transients that occur during the measurement. An ideal chirp of this sort is determined by measuring the average chirp rate and the power.
Analysis of the radar signals begins during the measurement process, since the I/Q data is recorded asynchronously and evaluated. Especially when working with signals with large bandwidths or in case of long measurement times, the duration of the analysis can be significantly reduced in this manner.
FM linearity
For characterisation of FM chirps, the FM linearity is very important, since it influences the accuracy of the object parameters.
This is best viewed using a spectrogram mode, which depicts how the signal’s spectrum fluctuates vs. time. Along with the frequency (x axis) and time (y axis), the signal strength is presented using a color-coding scheme. This provides a good overview of the signal behavior and allows assessment of the timing even for brief signal impairments. If impairments of this sort occur, additional functions can be used for further detailed analysis.
The RF spectrum diagram, for example, provides a picture of the measured signal’s overall spectrum at a selected time. It shows the spectrum not only of the wanted signal but also of possible impairments.
With the “Frequency Deviation Time Domain” diagram, the frequency errors determined in this manner for a complete chirp can then be demodulated and displayed separately. If you are interested in detecting very low-amplitude impairments, you can additionally use video filters or averaging over multiple chirps to minimize any noise that is present.
Accuracy of the speed measurement
Another important parameter during development of radar sensors is the deviation from the ideal chirp length, since this influences the accuracy of the speed measurement. For this purpose, the measurement results are best to be viewed in a table with the start time and length of the chirp along with the parameters mentioned above.
All of the chirps that fall into a previously defined result range are taken into account. Each individual chirp can be identified based on a timestamp. In addition, the chirps are sequentially numbered in a table so they can be better distinguished from one another.
The measurements described here can be performed with the spectrum analysers up to a frequency of 67GHz without any additional accessories. In situations requiring measurement of radar signals at frequencies over 67GHz, harmonic mixers must be used to convert the input signal to the analyser’s intermediate frequency (IF).
It is important for the analyser to use the highest possible IF, since this will result in a wide and unambiguous frequency range. This is especially critical when analysing broadband signals such as LFMCW signals.
The technologies described in this article can be expected to further influence, if not revolutionise, driving safety in the years ahead. Radar technology will continue to play a key role.
As technology advances, it will be feasible to generate increasingly complex signals with a wide bandwidth, allowing greater resolutions along with improvements in safety. However, the proliferation of signals of this sort, especially at intersections, will make it necessary to ensure that sensors can clearly distinguish the right signals. For example, signal coding can be used in one possible implementation.
As automated driving becomes increasingly prevalent, car-to-car communications (C2C) will supplement the described technologies. C2C is based on WLAN standard 802.11p and will allow future vehicles to communicate with one another as well as with the road infrastructure.
Writer is Christoph Wagner head of business development for the automotive market segment at Rohde & Schwarz in Munich.